Academic and industrial research Projects
(the most recent ones)
|
EASEBIKE - rEAl-time preSEtting of motorBIKE suspensions by automatic
road pothole detection with an embedded hybrid 2D-3D computer vision system
Automotive has performed great efforts to improve travelling comfort in vehicles, employing advanced technologies to reduce the effects of road
pothole for driver and passengers. These adaptive systems rely on complex sensing technologies to ensure that the suspension promptly reacts when entering a
pothole. A step forward for further improvements consists in detecting a pothole in advance to preset the suspensions precisely at the hole.
This requires the pothole to be sensed remotely. While such technologies are being considered to be used for cars, for motorbikes the need for low-cost, low-power
consumption embedded systems limits their use.
The goal of the EASEBIKE Project is the automatic detection od 3D pothole in real-time by motorbikes with an embedded, on-board,
hybrid 2D-3D imaging system, endowed with a IMU and GPU computing facilities, for pre-settings of suspensions through predictive technology.
This system exploits artificial intelligence through deep-learning
for the automatic
detection and characterization of potholes. Data fusion of vision, magnetic and inertial sensors allows locating and characterizing a pothole with a
great accuracy, also fulfilling all time constraints.
The Project has been funded by VRM SpA (owner of the Marzocchi brand), a leading company in suspension manufacturing.
NEWS,
download

|
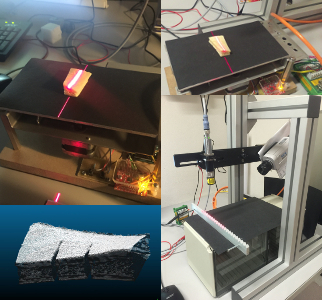
MAVERIK - MAchine Vision for automatEd zeRo-defect
analysIs in fabriCs
Nonwoven fabrics is an important sector of European economy, and Companies operating in the sector are committed to achieve higher degrees of sustainability.
The manufacturing process involves several working steps yielding unfinished products at each stage. Ensuring the highest quality level at the intermediate
stages is mandatory, even to improve the sustainability by reducing waste. Usually, this is performed through different machine vision (MV) systems, one for
each stage.
The goal of the MAVERIK Project is building one MV system, constituted of several subsystems sharing the same hardware infrastructure and the same
software framework, according to the one-fits-all paradigm, using artificial intelligence and machine learning algorithms. This was possible thanks to the wide experience of CVG, which allowed performing an effective
high throughput multi-purpose design, minimizing the need of different camera and light configurations. All the algorithms for defect detection were conceived
with a coarse-to-fine strategy and the real-time image analysis is mainly performed in GPUs.
The Project has been funded by ALCANTARA SpA, a world leading company in exclusive nonwowen fabrics
(DEMO VIDEO).
|
RADIOMICS - Local RADiomic features extracted from multimodal
sequences to characterIze heterOgeneity of tuMour habItat and produCe
imaging biomarkerS
Imaging diagnostic has entered a new era with the availability of high-performance GPUs on entry level workstations, which has
permitted to extract a huge number of information from medical images often using well-established machine learning techniques.
Our research group (CVG) has been working for more than 20 years in multi-feature analyses of medical and biomedical images, in the research field
newly named radiomics, to develop diagnostic, prognostic and predictive imaging biomarkers in breast, lung, liver, prostate, pancreatic, oesophageal and gastroesophageal cancer. In fact, image phenotyping can reveal information regarding the underlying tissue's texture,
tumour physiology, or even molecular properties of cancer that are concealed from visual inspection.
The RADIOMICS Project aims at exploiting our well-established quantitative imaging, machine learning and artificial intelligence techniques
to investigate local radiomic heterogeneity of tumour habitat using single- and multi-modal imaging (e.g. MR, mpMR, CT, CT perfusion, PET)
and hybrid technologies (CT/PET, PET/MR).
The goal is developing diagnostic, prognostic and predictive imaging biomarkers, also providing a relevant
contribution for patient's stratification and staging.
The Project has been funded by a consortium of European academic hospitals and oncologic Centres.
|
PHENOMICS - Cancer stress PHENomics: autOmatic Microscopy
Image analysis for in vitro phenotypization of heterogeneity of stressed tumour
CellS
Preclinical in vitro studies typically assay cell viability and proliferation, cell cycle perturbation, programmed cell death triggering,
and gene expression modulation of cell samples exposed to physical or chemical treatments. In recent years, the emerging discipline
of tissue phenomics has stimulated clinical research, improved clinical drug development and treatment of patients, with a great
potential impact on oncology. Analogously, single-cell phenomics by microscope image analysis has the potential to positively impact
on in vitro studies, offering a quantitative evaluation of treatment effects.
In particular, cell imaging opens to unprecedented spatial phenomization, to capture tumour response heterogeneities at subcellular
level, by selecting proper phenomic features.
Anticancer treatments share the common goal to selectively stress, and ultimately damage, cancer cells, while not perturbing the
physiological state of healthy ones. The aim of PHENOMICS is to characterize cancer cell response to different stress conditions by
microscope image analysis, in order to quantify stress-induced alterations in the distribution of phenomic markers. Image-based
phenomization will increase the benefit/cost ratio of the studies, by providing more robust and consistent data while reducing times
and costs, ultimately boosting the research of effective treatments and speeding up translation of results into next preclinical
and clinical trial phases.
The Project has been partly funded by the IRCCS - IRST, Istituto Scientifico Romagnolo per lo Studio e la Cura dei Tumori
(The Cancer Institute of Romagna).
|
EDEN - Early DEtection of plaNt stress and emerging disease
Plant diseases cause significant food losses and reduction in productivity across the world. Early detection of infection
can often be the only effective solution to eradicate the problem. In general, early detection of stress conditions,
due to pathogens or drought as well, helps preventing further damages. Several approaches are known in the literature to
face this problem, including image-based phenotyping using digital cameras. The main benefit of this
approach is that it is contactless and non-invasive, therefore apt to be used for on-line monitoring.
The EDEN Project focused on the analysis of circadian movements through the characterization of leaves motion in
time lapse, to characterize their change in case of different causes of stress. Through a hybrid region-based and
feature-based tracking approach is possible to analyse movements of single leaves, cluster of leaves or whole crops,
under different stress conditions, proving that circadian leaf movements are related to the physiological state of the plant.
In this way, it has thus been possible to detect, just after few days, the presence of stress, due to drought or infection
in several plants (including sugar beet, potato and tomato) and quantify its degree.
The Project was funded by Syngenta S.p.A.
|
|
Stomatal pores play a crucial role in plant growing, working for both CO2 uptake and water transpiration, balanced through
stomata opening and closing. In particular, this mechanism allows plants to regulate water loss and, ultimately, to survive.
This ability is especially important for plants during drought stress, when any water loss can make the stress situation worse
and worse, up to endanger their own life. These last years have increasingly exposed plants to drought, which is representing
one the most important problem in agriculture.
The possibility to drive stomatal movements has drown increasing interest in the agronomists community. The ISTOMHICS Project
aimed at developing methods to automatically segment and measure the main features of stomata, in stacks of images acquired
with a confocal microscope. The well-established expertise of CVG in microscopy imaging allowed developing a very effective,
yet efficient, segmentation algorithm providing accurate measures of stomata's features (eg. lenght, aperture, etc.) that are used in a High-Throughput System for
High Content Screening of assays, aiming at assessing the effects of different chemical compounds on stomata movements.
The Project was funded by Syngenta SpA.
|
|
Unmanned Aerial Vehicles ( UAV or, more informally, drones) are nowadays widespread in several application fields.
Their success is mostly due to the possibility to achieve cheap and high-resolution aerial views of every place, since they
are relatively small and agile (the last ultra-compact models can even fly indoors). Nevertheless, they are not exploited at their best yet, since most of these applications just
collect high-resolution sequences or perform image analysis (e.g., object detection or planar automatic environmental
measurements) on classical 2D images. In fact, having multiple data of same objects shot from different points of views
is known to allow 3D object reconstruction, for instance through SLAM (Simultaneous Localization And Mapping)
algorithms.
Nevertheless, their numerical instability and need of relavant computational resources has brought these algorithms
to work accurately only in well-controlled conditions, using expensive equipment.
The 3-DARE Project aims at developing a software system to perform an accurate 3D virtual reconstruction of any
natural or urban environment, just exploiting the visual information delivered by a drone, hence suitable to
all UAV devices and for any application. This is achieved using a quad-core processor, a GPU, and optimization in hardware.
Additional (inertial, magnetic, etc.) sensors available on-board are exploited either
to perform in real-time or to improve the accuracy of the final 3D reconstruction. Then, our image analysis is performed
by exploiting full 3D information.
This library exploits the experience we gathered in satellite imaging, since the first
SLAM algorithm we started developing back in 2007 in the STARS Project,
and subsequently refined in the challenging ASIMO Project.
The Project is partly financed by an Italian private company.
|
|
3DVirBone - 3D Virtual model of a human Bone tissue generated
through a portable real-time laser scanning system
Precision surgery is one of the main goal of the technologic innovation in orthopedy, this including custom implants, whose
three dimensional prostheses are designed arising from the diagnostic images of the patient and based on the specific
osteo-cartilaginoid defects. Nevertheless, still there is a high number of failures, mainly due to the geometric mismatch between
the implanted prosthesis and the specific articulation, yet more in case of wrist, elbow, shoulder and ankle.
Meanwhile, laser-scanning technologies have taken several steps forward and several devices exist capable to perform a rapid
3D scanning of the most common objects. However, the high diffusion shown by translucent objects, such as bones, jeopardizes
a high-accuracy 3D object reconstruction.
The goal of the 3DVirBone Project is realizing an innovative and highly accurate system, based on an industrial camera and a
low-power laser, to scan a small bone cage to provide its virtual 3D CAD model in real time. This will constitute
the reference model to be manufactured by a robot working in a clean room.
This result can be achieved thanks to the advanced local-based signal denoising techniques developed by CVG in the course
of years, that allow extracting information even when they are subtle, such as in case of low light (e.g., night vision) or
in the presence of reflection and diffusion phaenomena (e.g., non-controlled industrial environment).
This sub-system is a part of a wider system to be realized in the Project Custom Implants, involving four more
public and private partners.
This Project is financed with a public grant of the European Regional Development Fund.
|
|
PERFECT - Automatic analysis of hepatic and lung PERFusion through the usE of
CT-4D image reconstruction
The Computed Tomography (CT) has been developed to combine together the diagnostic capabilities of Radiology and Digital Processing,
the latter typically provided by computers. The innovative 256-Slice CT scanner offers the possibility of performing Dynamic Contrast Enhanced-CT
(DCE-CT) to investigate greater volumes in a shorter amount of time. This improves performances in terms of image resolution and definition, in particular
for vascular structures, and reduces the radiation dose for patients.
The DCE-CT perfusion (briefly, CTp) has shown to be useful to perform perfusion analyses, aiming at assessing the effectiveness of the anti-angiogenic
therapies, whose purpose is inhibit the vascularization nourishing cancer lesions.
This could permit to evaluate the possible reduction of the tumour neoangiogenesis even at the early stage, before observing the modifications in size,
which occur just at a subsequent stage.
The PERFECT Project aims at developing new methodologies based on semi-automatic analyses of a temporal 3D-CT sequence of slices,
capable to enable quantitative assessments of the effectiveness of treatment for lung and hepatic lesions, through
analysing the temporal evolution of some parameters (radiometric, geometrical, statistical, etc.), extracted from
regions of interest inside the lesions, acquired in a short time and manually selected by an expert radiologist.
Tracking these image-based parameters over all the image sequences acquired throughout the CTp examination, allows measuring the perfusion parameters
needed to quantify the neoangiogenesis degree, and the effectiveness of therapy, accordingly. All the
algorithms are conceived for high performance distributed GPU architectures, so to enable even real-time
4D image analysis.
The Project has been partly funded by the IRCCS - IRST, Istituto Scientifico Romagnolo per lo Studio e la Cura dei Tumori
(The Cancer Institute of Romagna).
|
|
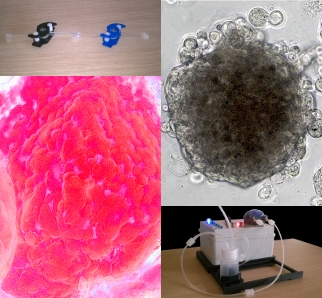
DYNAMO - 3D DYNamic
tumour models: validation of new approaches based on Automatic Microscopic
Image analysis for in vitro therapeutic screening and for the Characterization of
the invasive behaviour of cancer cells
In the past, the in vitro screening of synthetic and natural product libraries for novel anticancer agents mainly relied on
cytotoxicity assays using established cancer cell lines grown as two-dimensional (2D) cultures. Such an approach indisputably
brought to reach several milestones, but showed important limitations as well. In fact, 2D cell cultures are far from modeling the in
vivo tumour for several seasons, including cell-cell interaction, agent penetration, response and resistance to drugs, and
these contribute to the high rate of clinical trial failures for new antitumor treatments. In vitro 3D cell cultures
(e.g. multicellular spheroids) could fill the gap. Furthermore, combining 3D cell cultures with fluidic systems
mimicking the blood stream, can really bring to obtain a representative 3D cancer model for predicting the effects
of treatments on the final target, the in vivo tumour.
The DYNAMO Project aims validating protocols to analyse morpho-biological features of 3D cultures used in pre-clinics therapies
to test anticancer drugs and radiotherapy protocols. The purpose of the Project is manyfold. First, setting up a procedure to
generate a 3D cell culture of a desired shape and size. Second, standardising a staining protocol to analyse viability and metabolic
activity of the single cells composing the culture. Third, establishing an in vitro model of tumour cell migration for analysing the
invasive behaviour, in other terms, the "metastatic" activity of cancer cells. Last but not least, developing automatic microscopic image-based
measuring procedures to obtain reproducible results.
The Project has been partly funded by the IRCCS - IRST, Istituto Scientifico Romagnolo per lo Studio e la Cura dei Tumori
(The Cancer Institute of Romagna).
|
|
ASIMO -
advanced Analysis of the Sequence of Images acquired by the Mercury Orbiter
The ASIMO Project is carried out in the framework of the BepiColombo
mission of the European Space Agency
(ESA), in cooperation with Japan, aiming at exploring the planet Mercury, and it is part of
MORE (Mercury Orbiter Radioscience Experiment), one of the two experiments
funded by the Italian Space Agency (ASI). Among the goals of MORE,
it will help to determine the size and physical state of Mercury's core, based on the analysis of its rotational state.
The rotational state of a celestial body is characterized by its obliquity and librations. The obliquity is
the angular amplitude between the normal to the orbital plane of the planet and its spin axis direction. The physical
librations are characterized, in the case of Mercury, by a longitudinal motion (which takes the form of a
sinusoidal wave) superimposed to the nominal planet spin motion. This behaviour is due to the Sun gravity-gradient
effect inducing a forced libration whose maximum amplitude is expected to be about 400 m at the equator.
In order
to estimate the rotational state of any solar system body, it is possible, in principle, to use complex dynamical
models where the fitting functions are very general, so that all possible dynamical states are considered. However,
in this case it is not accurate enough.
As a spinoff of the MORE Project, the goal of the ASIMO Project is to compute the libration of the planet. In particular, for the study of the Mercury's rotational state we exploit the particular geometry of the problem
that permits the implementation of a more meaningful method, where the estimation problem is performed in two successive steps.
First, the estimation of the obliquity is performed and then, using a provisional reference frame, the residual information
is used to estimate the amplitude of the forced libration. The observations are computed by finding out the parameters of
the geometric transformation by correlating pairs of optical images of the planet surface, both of them partly looking
over the same region, at different times, under different scale and illumination condition. For each pair, from the shared
region we can extract the invariants that permit to determine the parameters of the geometric transformation between the
couple of views and, subsequently, to fully determine the three components of the libration, with sub-pixel accuracy.
As a spinoff of the MORE Project, the ASIMO Project is funded by the Italian Space Agency (ASI).
|
|
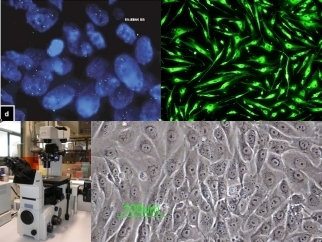
STAMINAL - Characterization of
STem cells by means of AutoMatIc
aNALysis of microscopic images in pre-clinic therapy
Nowadays, acute and chronic respiratory diseases (such as, pulmonary emphysema and fibrosis) are more and more widespread,
due to life style (e.g. cigarette smoke) and the increasing urban pollution, and these represent the third cause of death
after tumours and cardio-circulatory diseases, thus inducing relevant sociomedical problems.
Normal pulmonary stem cells offer a novel opportunity in regenerative medicine for clinical applications in
the treatment of chronic degenerative diseases, including Idiopathic Pulmonary Fibrosis (IPF).
The STAMINAL Project supports the on-going studies for biomolecular characterization of proliferation and differentiation of
tumour's and IPF's pulmonary stem cells. In particular, the Project aims at developing a tool for automatic culture analysis
of normal or aberrant (tumours' or IPF's) pulmonary stem cells. The possibility to monitor and to assess cell cultures enriched
with normal pulmonary stem cells through common microscope inspections without any intervention by operators would allow the
stem cells to be employed for grafting in the keeping of the Good Manufacturing Practice (GMP) rules.
The Project has been partly funded by the IRCCS - IRST, Istituto Scientifico Romagnolo per lo Studio e la Cura dei Tumori
(The Cancer Institute of Romagna).
|
|
This is an automotive project tackling the problem of high dynamic range image analysis and
metrology. The objective of the AUTOBEAM Project is to characterize, both from a geometric
(the profile) and a photometric point of view, the light distribution emitted by different automotive
headlamp beams projected on a panel, within the range of accuracy required by the European regulations.
The high accuracy in the vehicle's alignment is provided by recovering in real time
the 3D instant trajectory of a vehicle while approaching the measurement system, using natural
markers and 3D sparse feature matching with stereoscopy. After alignment, a commercial low cost CCD camera has been used.
Exploiting the camera's response function (recovered experimentally) an adaptive segmentation
algorithm has been developed that permits to perform accurate measurements
of the luminous beam profile as perceived by human eyes.
It is worth noting that this is the first automatic prototype using a low cost CCD
sensor to assess the compliance of vehicle's headlight beams with the European regulations.
The Project has been partly funded by industry
(Simpesfaip S.P.A.).
|
|
STARS - Standalone
Three-Axis
spacecraft oRientation Sensors
Current attitude determination systems on-board Earth orbiting, Nadir pointing spacecraft rely on Earth crossing
sensors which allow the detection of the Earth/atmosphere horizon and, hence, the Earth centre direction. This
information enables the computation of two attitude angles, while the angle about the sensor line-of sight remains
unknown, unless another source of attitude information is available.
The goal of STARS, carried out in collaboration with
the Aerospace Group of DIEM,
is the development of novel standalone spacecraft attitude sensors, capable of estimating
the full three-axis orientation of an Earth-orbiting satellite. The novelty of the Project consists in developing
an approach that only exploits the real time analysis of image sequences of Earth surface captured from space,
without using any information from other sensors.
The challenging task is to design an algorithm for pose estimation relying on image registration and able to measure
the attitude Euler angles whitin the strict accuracy required (1 arcsec).
The Project has been funded by the University of Bologna as a Strategic Project.
|

|
The increasing processing power available on PC and embedded architectures has opened the doors to real time
3D analysis of crowded scenes, where the environment under surveillance is completely covered by a loosely
synchronized camera network.
ENVISAGED aims to exploit the experience gathered by CVG in 3D people tracking and analysis
carried out with couples of cameras and
3D stereoscopy to develop a tracking people system for wide areas. The network camera system is self calibrating and the core of
the application is the people tracking technology we have developed. On top of the outcome of our group, it will be
developed a behaviour analysis system and an effective decision-making system, by two more academic units,
respectively. A Small Enterprise will develop the commercial product and a Large Enterprise is in charge of
bringing the system to the market.
|
|
The automated analysis of images and sequences plays a crucial role in most of the computer vision systems for
medical images. The assessment of pathologies or treatments is often entirely still left to human (visual) evaluation,
because of the objective difficulty to develop automated (or computer aided) assessment systems, also due to the human
health being a critical issue.
DERMOCAL aims at developing a portable and low-cost system able to achieve automatically, in vivo and routinely,
measurements of the skin surface to quantify the skin changes in dermo-cosmetic treatments. The system is based on a
2 cm2 capacitive device.
Several features have been extracted from the 3D skin topographic structure by using advanced image processing
and analysis methods.
The accuracy achieved in measuring depth and width of the skin's microrelief makes our system apt to quantify changes of
the skin surface and to be used in comparative follow-up studies in dermatology and dermocosmetics, accordingly.
The Project has been partly funded by the University of Bologna.
|
| | | |
|





